TDFファイル
かつて、レーシンググルーヴはAIWのファストパスを視覚化したものだった。この反応はトラックの TDF ファイルで定義されていました。
現在、グルーブはトラックサーフェスと結びついているため、ファストパスのグラフィカルな表現は必要ありません。これを削除するには、TDF の [LOOSE] セクションを探し、Reaction=groove で始まる行を削除するか、行の前に // を追加してコメントアウトして無効にします。
路面のジオメトリが増えるということは、グリップレベル(とグルーブ)が人々のレーシングラインとトラックアクティビティに任されるということだけではなく、これらすべての新しい頂点に対してノイズレベルを生成(と微調整)することが可能になったので、偽のサイン波レスポンスが方程式から取り除かれることも意味します。典型的なrF1トラックとアップデートされたrFactor 2トラックのトラック変数の違いを見てみましょう。これらはTDFファイルの先頭付近にあります。

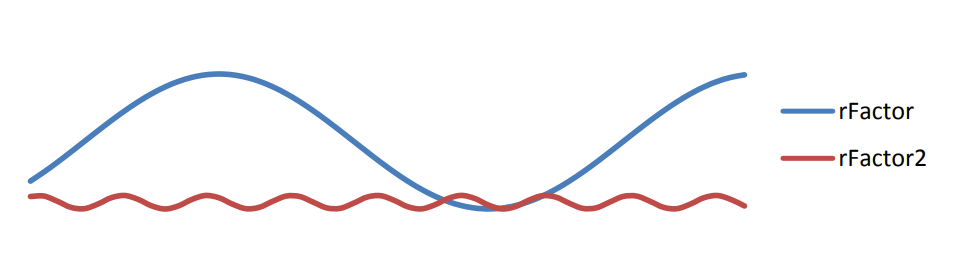
RoadBumpAmpが10倍小さくなり、RoadBumpLenもかなり短くなっていることに注目してほしい。 rF1とrFactor 2の値は、下の簡略化した図に示されているが、違いを強調するために少し誇張されている。
では、なぜ正弦波を完全に取り除かないのか?結局のところ、それは人々が古いトラックに抱く人為的な「懸念」のひとつだった。なぜ、地形メッシュに信号を重ね合わせ続けることに意味があるのでしょうか?
まず、ポリゴンベースの3Dメッシュは、ソースデータが単純なポイントツーポイントの図面であれ、レーザースキャンされたポイントクラウドであれ、サンプルの集まりであることに変わりはないことを理解する必要があります。
また、RealRoadではメッシュの解像度を上げることができますが、頂点数をいくら増やしても(サンプルの)近似であることに変わりはありません。タイヤモデルがどんどん洗練されていく昨今、サンプリングされた不完全な部分を感じ取ることができるようになり、その結果は「間違っている」と感じるようになるでしょう。そのため、高周波信号(アルペンのコースで滑っているような印象を与えない程度に高い信号)の形で、振幅が非常に小さい微量のノイズ(これはディザリングとして知られる処理に非常によく似ている)を適用するのは良いアイデアだ。
これは頂点ノイズの上に課されるため(この場合も、最初に点群データを使うか、Noiseモディファイアを適用する)、TDF波は、rFactorで通常行われていたような路面のでこぼこ効果全体を処理するのではなく、不完全な部分を滑らかにするためだけに機能します。
そして第二に、rFactor 2のTDF波は、実際には単純なサイン波以上のものである。繰り返しを極限まで減らすために、正弦波の代わりにハードコードされた "フラクタル・パターン "が使用され、さらなるランダム性を持たせています。この "ランダムに "スパイクされたノイズは、明らかに指定されたTDFパラメーター内で動作するので、波をセットアップするプロセスは以前と変わりませんが、結果は異なり、よりユニークになります。
これらの変数は、サーフェスタイプの実際の[FEEDBACK]レスポンスで呼び出されたときにのみ使用されるので、TDFファイル全体を調べて、BumpAmpとBumpWavelenをこれらの変数にリンクさせるか、既存の値を最終結果がほぼ同じになるような数値に置き換える必要があることを忘れないでください。
TDFファイルで値をグローバルに宣言できるようになり、試行錯誤を減らすことができるようになりました。これらの値は、下の例のように、さまざまなフィードバック・インスタンスに割り当てることができます:

最後に、デカールを追加する際に物理的な精度に妥協せざるを得なかったと感じた場合、そのダメージを元に戻すオプションがあります。例えば、ペイントされた道路ラインが、ちらつきのためにレース面より10mm上に配置されなければならなかったとします。
この場合、物理的なラインは、レーシングサーフェスの上に0.010 + (-0.008) = 0.002mあるように感じられます。
DeepLに放り込んだだけだとわけわからないな